CANBUS development and network connection
CANBUS development and network connection
Take the Volkswagen Group as an example. As early as 1997, Volkswagen adopted CANBUS with a transmission rate of 62.5 Kbit/m on the comfort system of PASSAT.
In 1998, CANBUS was added to the drive system of PASSAT and GOLF, and the transmission rate was 500Kbit/m.
In 2000, Volkswagen adopted a second-generation CANBUS with a gateway at PASSAT and GOLF.
In 2001, Volkswagen improved the design standards for CANBUS, increasing the comfort system CANBUS to 100Kbit/m and the drive system to 500Kbit/m.
In 2002, Volkswagen Group used the third generation CANBUS with in-vehicle network control unit on the new PQ24 platform.
In 2003, Volkswagen Group used the 5-fold CANBUS system on the new PQ35 platform, and a single-line LIN-BUS appeared.
The CANBUS bus technology is constantly evolving. In the 1980s, BOSCH engineers began to study the automotive serial bus system, because at the time there was no network protocol that could fully meet the automotive engineering requirements. Also participating in the study were Mercedes-Benz, Intel, and professors at two universities in Germany.
In 1986, BOSCH presented CAN at the SAE (Automotive Engineers Association) conference. In 1987, Intel introduced the first CAN control chip -82526. Subsequently, Philips Semiconductors introduced the 82C200. Until 1993, the international standard ISO11898 of CAN was announced. The CAN protocol is widely used in various automation control fields. In 1992, the CIA user organization was established, and then the first CAN application layer CAL was designated. In 1994, the International CAN Academic Conference (ICC) was established. At the same time, the American Society of Automotive Engineers designated the SAEJ1939 standard on the basis of CAN. For truck and bus control and communication networks.
Today, almost every car produced in Europe has CAN, and there are two sets of CAN on the premium bus. Through the gateway interconnection, nearly 60 million CAN controllers were put into use in 1999, and more than 100 million were sold in 2000. CAN chips, the number of CAN borrowing points used in automobiles in 2001 exceeded 100 million. CAN-based application layer protocol applications are more general-purpose: suitable for factory-level automation and embedded applications suitable for mechanical control.
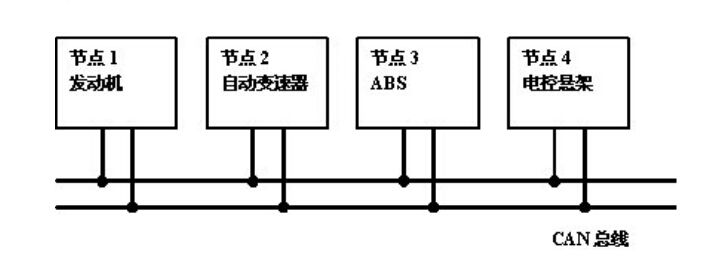
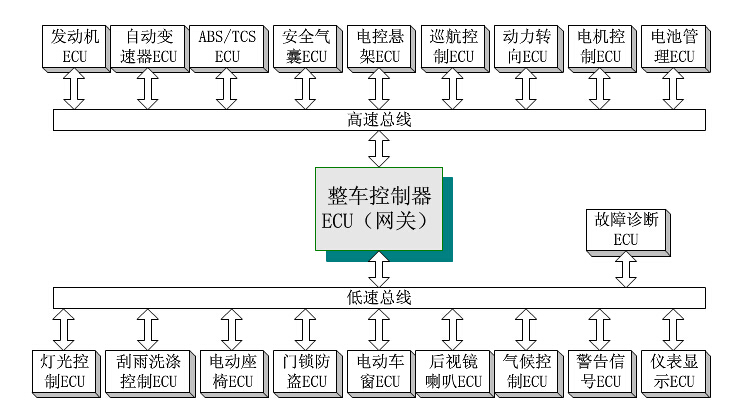
At present, the network connection method in the automobile mainly adopts two CANs, one high-speed CAN for driving the system, the speed reaches 500Kbit/m, and the control unit with high real-time requirements such as the engine and the motor.
Another low-speed CAN for the body system, the speed is 100Kbit / m, mainly for body control, such as the collection and feedback of lights, doors, windows and other signals. It is characterized by many signals but low real-time requirements, so the implementation cost is low.
